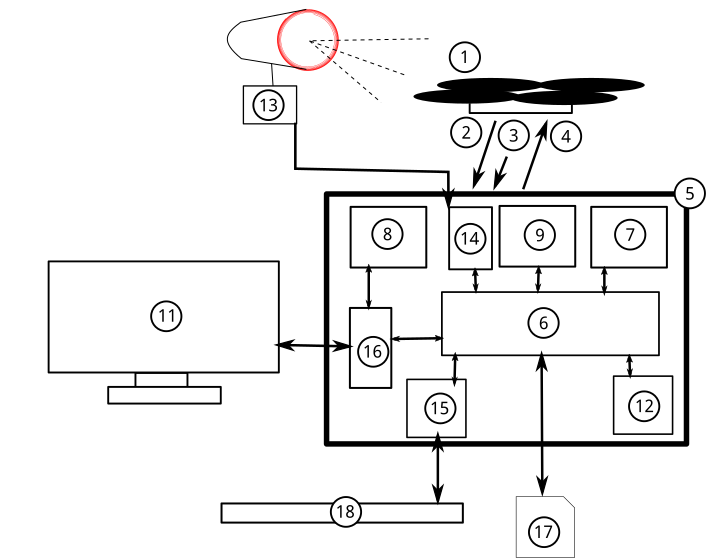
Le schéma suivant montre l’organisation générale des aspects techniques du projet :
- 1 – Drone Parrot AR2.0
- 2 – Canal Wifi Vidéo
- 3 – Canal Wifi des données de navigation
- 4 – Canal Wifi des commandes de vol
- 5 – PC connectée par Wifi
- 6 – Interpréteur LUA
- 7 – Module de gestion des commandes
- 8 – Module de décodage vidéo
- 9 – Module de gestion des données de navigation
- 11 – Moniteur
- 12 – Module de lecture des entrées utilisateurs
- 13 – Système de capture de mouvement Vicon
- 14 – Module de récupération des coordonnées externes
- 15 – Module d’échange des coordonnées
- 16 – Module d’incrustation et de traitement vidéo
- 17 – Console interactive ou script lua
- 18 – Serveur HTTP
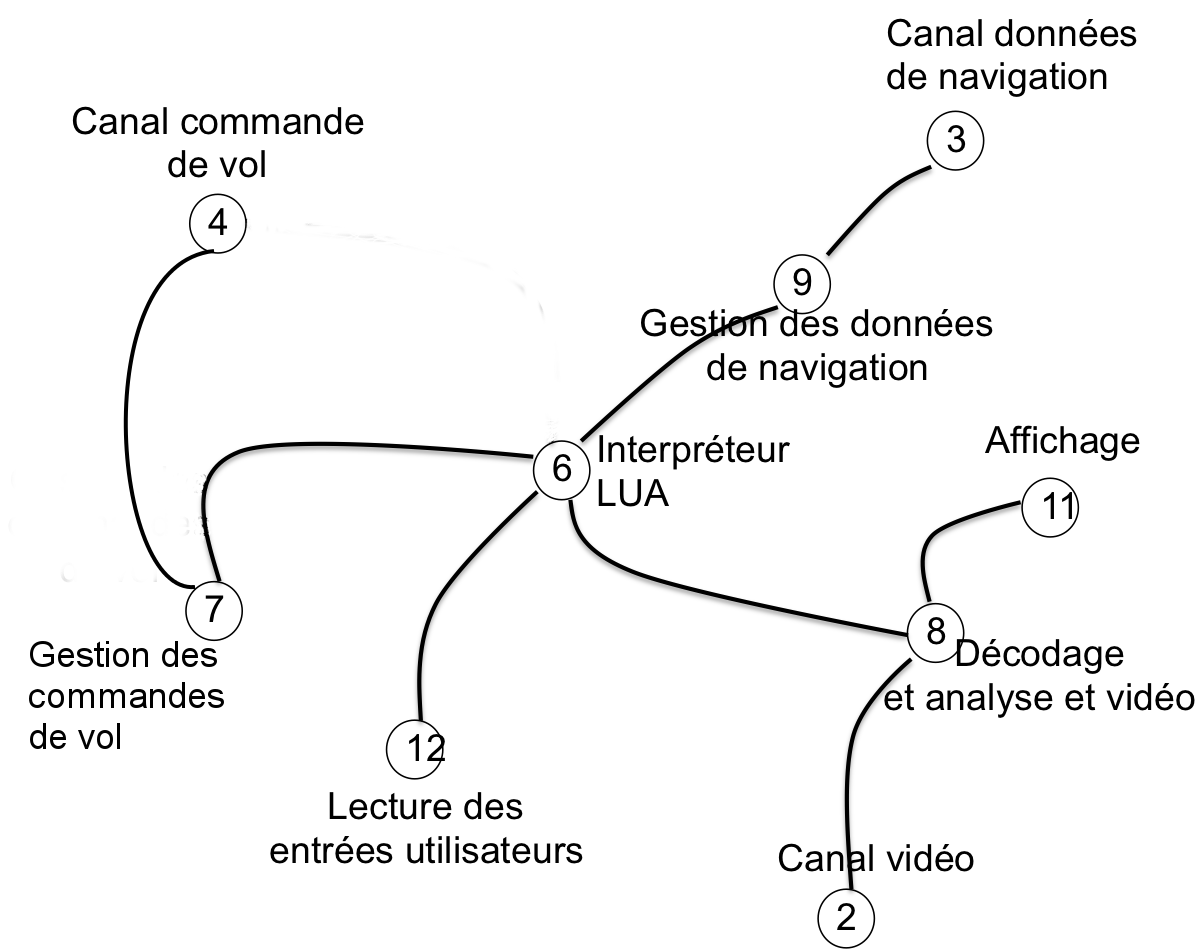
Organisation des transferts de données est typiquement le suivant :
- 6 vers 4 : envoi des commandes de vol (e.g., décollage, atterrissage)
- 3 vers 9 : récupération des informations de vol
- 9 vers 6 : envoi des données de navigation analysées
- 2 vers 8 : récupération du flux vidéo
- 16 vers 11 : affichage de la vidéo et incrustation des informations de vol
- 6 vers 8 : transmission des information de vol
- 8 vers 6 : transmission des données d’analyse de la vidéo à l’interpréteur
- 6 vers 7 : envoi des commandes de vol
- 12 vers 6 : récupération des entrées de l’utilisateurs (soit produite au clavier ou par un appareil Leap Motion)